自由度機械臂
發布時間:2016-08-02 15:09:54
一、産品介紹:
本産品模拟人的手臂,利用舵機可以進行一定範圍的轉動、伸縮、抓取等動作,也可以使用編程語言設計一定的動作,根據位置安裝,可以模拟車間生産線(xiàn)等,可應用于教學、物流模型等。
二、設備功能:
産品采用STM32F103RBT6作爲核心控制闆,通過核心控制闆上的I/O連接多個舵機控制機械臂關節轉動和機械爪的收縮舒張,可以使用藍牙進行控制,也可以使用串口操作進行機械臂的控制等多種方式。
三、技術參數:
1、STM32F103RBT6核心闆
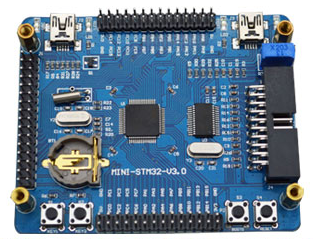
闆載資源:
1、CPU: STM32F 103RBT6, ARM Cortex-M3内核,128kB Flash,20KB RAM,最高工作時鍾72MHz, 64腳
2、USB接口,可以做USB通信實驗
3、USB轉RS232 ( ISP下載)可做RS232通信實驗(進入ISP燒寫模式方法:按下BOOTO鍵同時按下RESRT鍵、釋放(fàng)RESET鍵、釋放(fàng)BOOTO鍵)
4、标準ARM JTAG 20 P IN仿真接口座(方便連接JLINK,ULINK2等主流仿真器)
5、一個彩色LCD模塊接口,支持本站的2.8彩色LCD模塊。
6、RTC後備電池座
7、AD調節電位器
8、電源指示燈、USB狀态指示燈,兩個用戶編程指示燈
9、兩個用戶按鍵,一個B0OT選擇按鍵,一個複位鍵
10、USB供電,最大提供800mA電流
11、8MHz 晶振,32. 768kHz 晶振
12、所有10口均引出,方便接外部電路做實驗
13、PCB尺寸: 82mmX 68mm
2、TBD2701舵機
TBD2701舵機采用PWM脈寬信号控制,由周期20ms,占空比0.5ms~2.5ms的脈寬電平 ,對應舵機0~ 270°角度範圍 ,
且成線(xiàn)性關系。 舵機控制器采用500~ 2500數值對應舵機控制輸出角度的占空比0.5ms~ 2.5ms的範圍,
這樣舵機的控制精度是(shì)3us,在2000個脈寬範圍内最小控制精度能達到0.3度!

産品信息:
| 産品重量 | 産品尺寸 | 工作電壓 | 空載電流 | 産品線(xiàn)長 | 産品速度 | 堵轉扭矩 | 産品特點 |
| 60g | 40*40.5*20mm | 5 - 8.4v | 100mAh | 30/45cm随機 | 0.16sec/60。 7.4v | 15kg.cm 6.6v 17kg.cm 7.4v | 扭力大、虛位小、噪音小以及運行平穩 |
3、合金機械爪
産品材料:鋁合金
産品重量:128g(含舵機)
最大張開口:55mm
産品特點:靈活輕巧,可夾取
相(xiàng)對較小的物件